Učitel: mobilní telefon, tablet nebo počítač připojený k internetu, projektor připojený k počítači / mobilnímu telefonu
Program Robocompass je v anglickém jazyce, ale je velmi intuitivní. Úkoly lze vypracovávat na počítači, tabletu či mobilním telefonu. Program Robocompass je zdarma a není nutné jej stahovat do zařízení.
Během přípravy na aktivitu doporučuji nejprve žáky seznámit se základními geometrickými pojmy v anglickém jazyce, které jsou v tomto materiálu využity. Sekce How to (Návod – v pravém horním rohu) obsahuje seznam jednotlivých příkazů v anglickém jazyce. Dále doporučuji věnovat se s žáky i procvičování zadávání příkazů. Ideální je promítnout program Robocompass např. na interaktivní tabuli, kdy žáci zadávají příkazy spolu s učitelem. To urychlí pochopení principu zadávání matematických příkazů.
V programu Robocompass je důležité rozlišovat velká a malá písmena (pokud body označíme velkými písmeny, pak je musíme takto zapisovat po celou dobu práce s programem). Doporučuji, aby žáci pracovali ve dvojici, protože díky tomu diskutují (někteří žáci mají problém doptávat se vyučujícího, ale ve dvojici se spolužákem komunikují většinou bez obtíží) a snaží se společně dosáhnout splnění zadaného úkolu.
V programu Robocompass není možné uvádět písmena s čárkou, jak jsou žáci ze základní školy zvyklí, proto např. v osové souměrnosti musíme obrazy bodů popisovat jiným způsobem, např. A1 atd.
Na závěr aktivity doporučuji porovnat s žáky odlišnosti při sestrojování osové souměrnosti do sešitu a v programu Robocompass a zaměřit se při tom zejména na označování bodů, samodružné body atd. Žáci tímto způsobem získají nový vhled, že existuje i více postupů k dosažení výsledku. Dále doporučuji probrat všechny alternativy možného zadávání příkazů a společně zhodnotit, které způsoby zadávání byly jednodušší a efektivnější.
Následující aktivita se zaměřuje na využití robotického programu Robocompass při zobrazení bodů prostřednictvím osové souměrnosti podle osy o. Aktivita využívá digitální technologie k zautomatizování rutinní činnosti a pomáhá žákům rozvíjet prostorovou představivost (lze nahlížet na konstrukci z různých úhlů díky manipulaci s pracovní plochou pomocí kurzoru) a matematické myšlení.
Doporučenou metodou je práce ve dvojicích, ale je na zvážení učitele, zda si metodu výuky neupraví v závislosti na podmínkách ve třídě.
První vyučovací hodinu při práci s programem Robocompass je vhodné věnovat základnímu nastavení programu a zkoušení zadávání jednoduchých příkazů. Žáci budou využívat sekci How to (Návod – v pravém horním rohu v programu), zde naleznou seznam a princip zadávání jednotlivých příkazů v anglickém jazyce, tímto mezipředmětovým vztahem si budou žáci rozvíjet slovní zásobu v cizím jazyce. Samozřejmě mohou na svých zařízeních využít i různé překladové aplikace, tím pádem budou rozvíjet i své digitální kompetence. Součástí aktivity je interaktivní pracovní list, který učitel buď vytiskne a rozdá žákům, nebo je nechá list vyplňovat na digitálních zařízeních. Pracovní list je zaměřen na aktivity související s osovou souměrností a pomáhá žákům pochopit princip zadávání příkazů, které využijí.
Ve druhé vyučovací hodině se už žáci budou věnovat samostatné práci nebo práci ve dvojici na jednotlivých konkrétních úkolech.
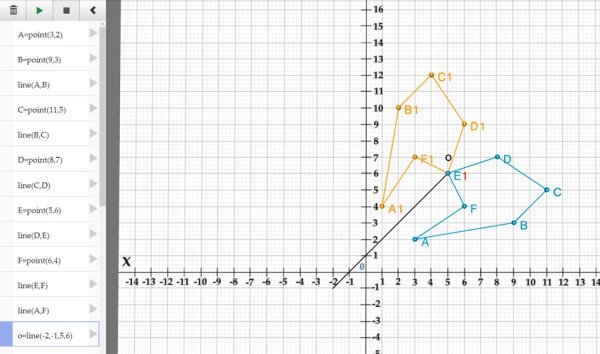
Úloha 1: Sestrojte obraz rovinného útvaru ABCDEF v osové souměrnosti podle osy o v programu Robocompass a jednotlivé příkazy v aplikaci popište slovně. Souřadnice bodů jsou: A=(3,2); B=(9,3); C=(11,5); D=(8,7); E=(5,6); F=(6,4). Osa souměrnosti o má počátek v bodě X se souřadnicemi (-2,-1) a prochází bodem E a její délka je 8 jednotek. V tomto programu osu souměrnosti uvažujeme jako úsečku.
Navštívíme stránky www.robocompass.com, kde se seznámíme se základním ovládáním tohoto programu (Obr. 1).

Obr. 1 Prostředí programu Robocompass
Ad 1) Žáci si musí nejprve správně nastavit pracovní plochu v programu, a to tím, že v programu kliknou vpravo na ikonu 2D. Tím se jim pracovní plocha zafixuje a nelze s ní dále různě manipulovat. Pokud by si žáci chtěli později prohlédnout svou konstrukci z více úhlů, stačí znovu kliknout na ikonu 2D a s plochou lze opět manipulovat. V prvním úkolu je potřeba nejprve zadat jednotlivé body. Body se v tomto programu zadávají na základě příkazu point(x,y), kde se za x a y volí libovolné souřadnice bodu. Před tuto zkratku se uvádí i označení bodu, např. A=point(5,3) (Obr. 2). Podobný postup využijeme pro sestrojení ostatních bodů.

Obr. 2 Zadání bodu A v programu Robocompass
U každého příkazu lze měnit barvy nebo polohu označení. Settings (nastavení) nalezneme u každého příkazového řádku pod ikonou ozubeného kolečka (Obr. 3). Ke každému příkazu lze přidat i popis, který se potom objevuje při přehrání tohoto kroku v horní liště, podrobnosti viz Ad 4) a Obr. 10.

Obr. 3 Nastavení změn barev a umístění názvu bodů
Ad 2) V druhém kroku je potřeba spojit body úsečkami podle abecedy tak, aby nám vznikl rovinný obrazec ABCDEF (obr. 5). Úsečku je možné vytvořit obecně příkazem line(Bod1,Bod2), kde za Bod1 a Bod2 zvolíme krajní body úsečky, konkrétně v tomto úkolu takto: line(A,B) (Obr. 4). Další a i jednodušší alternativou je spojit body příkazem polygon(Bod1,Bod2,Bod3… atd.) (Obr. 6). Je na zvážení vyučujícího, zda nechá žáky pracovat s programem samostatně a žáci sami budou hledat alternativy řešení a následně je prezentovat, anebo vyučující na konci hodiny žákům další alternativy ukáže.
Podobný postup využijeme pro propojení ostatních bodů (Obr. 5).

Obr. 4 Zadání úsečky AB v programu Robocompass

Obr. 5 Sestrojený obrazec ABCDEF

Obr. 6 Zadání spojení bodů pomocí příkazu polygon v programu Robocompass
Ad 3) Nejprve je potřeba sestrojit osu o. Dle zadání má osa souměrnosti o počátek v bodě X se souřadnicemi (-2,-1) a prochází bodem E a její délka je 8 jednotek. Příkaz pro osu souměrnosti o lze zadat takto: o=line(-2,-1,E,8) (Obr. 7) Název osy píšeme před rovnítko. Do závorky se nejprve uvádí souřadnice bodu počátku osy, tedy (-2,-1), a následně se uvádí bod, kterým osa prochází, tedy bod E, a nakonec se uvádí délka osy, tedy 8 jednotek nebo prostřednictvím krajních bodů, tzn. o=line(X,E,8) (Obr. 8).

Obr. 7 Sestrojení osy souměrnosti o

Obr. 8 Sestrojení osy souměrnosti o prostřednictvím krajních bodů
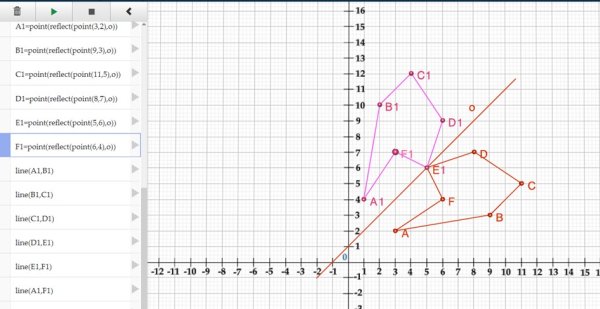
K sestrojení obrazu A1B1C1D1E1F1 rovinného útvaru ABCDEF v osové souměrnosti s osou o je potřeba zobrazit každý bod obecně podle příkazu reflect(X,o), kde X je obraz a o je přímka, podle které se má v osové souměrnosti zobrazit obraz bodu. Konkrétně zadáme obraz bodu v osové souměrnosti podle osy o takto: A1=point(reflect(A,o)) (Obr. 9), kde bod A1 je obrazem bodu A v osové souměrnosti s osou o a lze zapsat také zápisem O(o): A → A1. Podobný postup využijeme pro sestrojení ostatních bodů.

Obr. 9 Zobrazení bodu A1 v osové souměrnosti podle osy o
Všechny nově zobrazené body A2,B2,C2,D2,E2 a F2 je nutné spojit úsečkami dle stejného postupu jako v Ad 2) (Obr. 10, Obr. 11), např. line(A1,B1).

Obr. 10 Úsečka A1B1

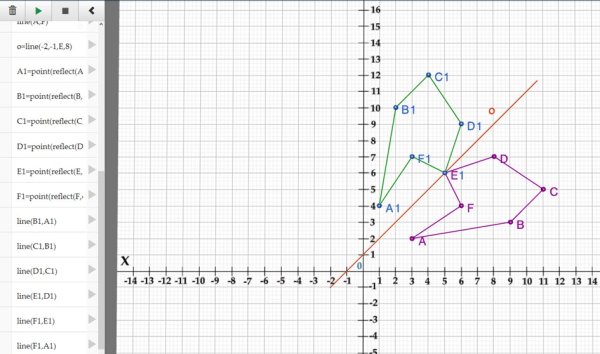
Obr. 11 Obraz rovinného obrazce A1B1C1D1E1F1 podle osy o v programu Robocompass
Ad 4) Popis jednotlivých kroků (Obr. 12) se uvádí v nastavení jednotlivých kroků. Kurzorem najedeme na zadaný krok a v pravém okraji se nám zobrazí ikona nastavení (Settings) – ozubené kolečko. Zde lze měnit barvy písma, zobrazovat/nezobrazovat označení např. bodu, úsečky atd., měnit polohu označení, doplnit popis jednotlivého kroku konstrukce a lze měnit nastavení rychlosti zobrazení popisu. Po vyplnění nebo změně některého z kroků konstrukce se toto nastavení automaticky ukládá – nastavení se nepotvrzuje, uživatel pouze zavře okno křížkem (na Obr. 12 zelený rámeček). Zadáváním popisu jednotlivých kroků konstrukce si žáci procvičují matematické vyjadřování.
Pokud chceme přehrát pouze jeden krok konstrukce, klikneme na ikonu Play v daném řádku (žlutý rámeček na Obr. 11). Pokud chce uživatel přehrát celou konstrukci v podobě animace, musí kliknout na ikonu Play v ovládacím panelu v levém horním rohu (červený rámeček na Obr.11).

Obr. 12 Zadání popisu kroku v programu Robocompass
Robocompass umožňuje ukládat práci přímo do účtů na Disku Google (ikona Save) (Obr. 13). Uživatelé, kteří nepoužívají Disk Google, mohou svou práci sdílet tak, že na ni uvedou přímý odkaz. Žák tedy sdílí soubory se spolužáky a učitelem.

Obr. 13 Ukládání konstrukce v programu Robocompass
V této aktivitě jsem jako možné úskalí předpokládala zadávání osy souměrnosti o, jelikož osa o prochází bodem E. To musíme při zadávání příkazu samozřejmě uvést, příkaz proto nelze zadávat jako klasickou přímku. Musíme jej zadat jako úsečku, a to takto: o=line(-2,-1,E1,8) – první dva body nám specifikují souřadnice bodu počátku osy o (úsečky); E1 – tímto bodem osa prochází; 8 – délka úsečky. Žákům tato část úlohy problémy nedělala, ve výuce jsme však narazili i na řešení, kdy žáci úlohu splnili, ale osa o nesplňovala požadavky, přestože výsledný osově souměrný útvar byl správně narýsovaný. Žáci nedodrželi v tomto případě délku osy o, která je součástí řešení. V příkazu jsou zadané pouze body, jimiž osa prochází. (obr.14).
Obr. 14 Neúplné zadání osy o
Dále žáci nacházeli spíše jiné alternativy zadávání příkazů, které byly také správné, což považuji za velký úspěch. Byl tak splněn i účel této úlohy s využitím digitálních technologií, tj. že je žákům umožněno hledat různé alternativy řešení pomocí aplikace Robocompass. Obr. 15 ukazuje, že žáci přišli s novou možností, jak zadat obrazy bodů v osové souměrnosti s osou o. Většina žáků příkaz pro body A1-F1 zadávala např. příkazem A1=point(reflect(A,o)), ale v tomto případě byl příkaz zadán A1=point(reflect(point(3,2),o)), což je možná alternativa správného zápisu. Body nejsou zadány pouze názvem bodu, nýbrž prostřednictvím souřadnic daného bodu.
Obr. 15 Jiné zadání obrazů bodů v osové souměrnosti podle osy o.
Na Obr. 16 zase žáci přišli na to, že pokud změní pořadí bodů u úsečky, výsledek zůstane stejný. Tedy že zadání příkazu např. line(A1,B1) je stejné jako line(B1,A1).
Obr. 16 Odlišné zadání úseček
Článek je publikován pod licencí Creative Commons - Uveďte původ-Neužívejte komerčně-Nezpracovávejte 3.0 ČR .
Článek nebyl prozatím komentován.
Pro vložení komentáře je nutné se nejprve přihlásit.
Článek není zařazen do žádného seriálu.
Materiály s klíčovým slovem NPO 3.1 DIGI vytvořil tým metodiků v projektu Podpora škol v kontextu digitalizace (Národní plán obnovy 3.1 DIGI) pro podporu pedagogů při ICT revizích.
Další informace, metodické materiály i inspiraci do výuky jednotlivých předmětů i napříč předměty najdete na webu https://digitalizace.rvp.cz/




Národní pedagogický institut České republiky © 2025



